
DaVinci-Assisted Ultrasonic Continuum Robot Navigation and Manipulation
DaVinci-Assisted Ultrasonic Continuum Robot Navigation and Manipulation
Course Project of Advanced Computer Integrated Surgery in Johns Hopkins University
Jan 2023 - Present
Group Leader, Instructor: Dr. Russel Taylor
- Designed a continuum robot navigation and manipulation system to improve reachability of DaVinci surgical robot.
- Integrated AcuNav ultrasound catheter to the DaVinci research kit with verification on phantom.
- Applied forward kinematics and ROS manipulation on redesigned DaVinci research kit.
- Implemented EM tracking system through NDI Aurora for the Acunav catheter to improve navigation accuracy.
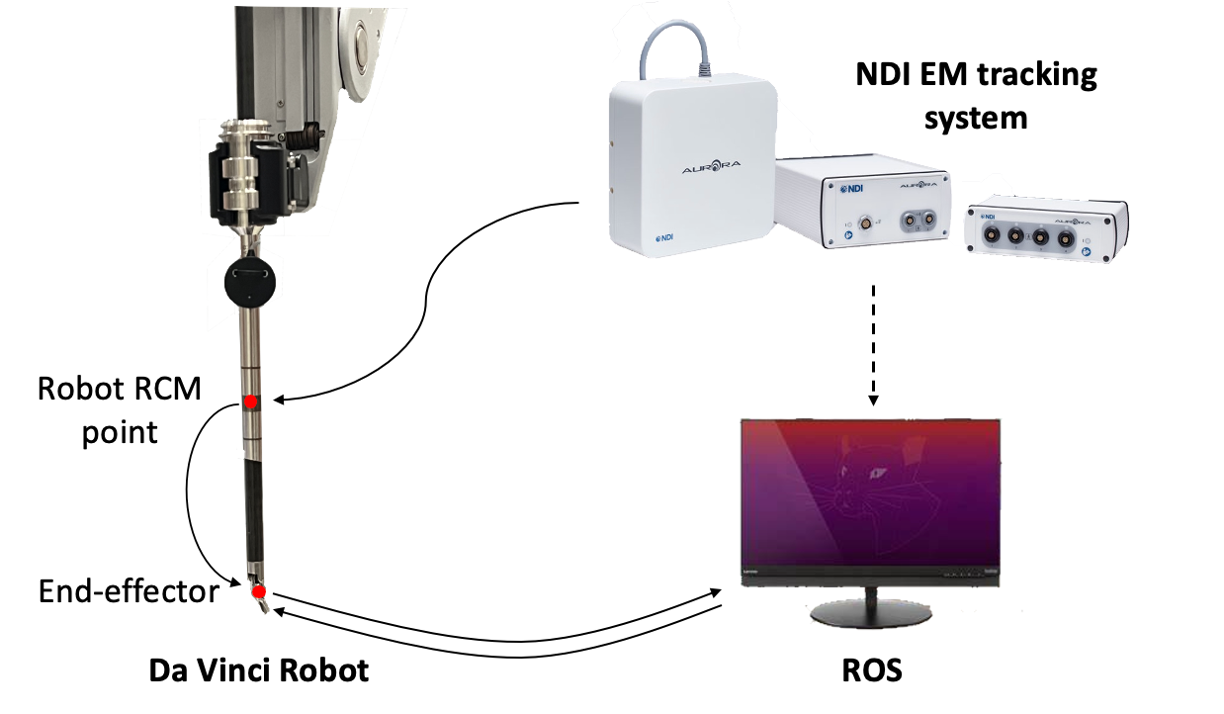 DaVinci-assisted robot navigation and manipulation project.
DaVinci-assisted robot navigation and manipulation project.