
Pneumatic Soft Haptic Glove for Immersive Mixed-Reality Rehabilitation
Published in IEEE World Haptics Conference, 2023
Recommended citation: Jiang, S., Chen, Y., Wang, W., Li, Q., & Brown, J. (2023). Pneumatic Soft Haptic Glove for Immersive Mixed-Reality Interactions. IEEE World Haptics Conference. http://jasporjiang.github.io/files/pneumatic_soft_haptic_glove.pdf
This paper presents a pneumatically actuated haptic feedback glove for interacting with 3D objects in a mixed-reality environment for rehabilitation purposes. The glove is lightweight and easily reproducible, with a soft pneumatic mechanism and modular design. The mixed reality techniques generate adjustable force feedback for a realistic sensation of touching virtual objects.
Recommended citation: Jiang, S., Chen, Y., Wang, W., Li, Q., & Brown, J. (2023). Pneumatic Soft Haptic Glove for Immersive Mixed-Reality Interactions. IEEE World Haptics Conference.
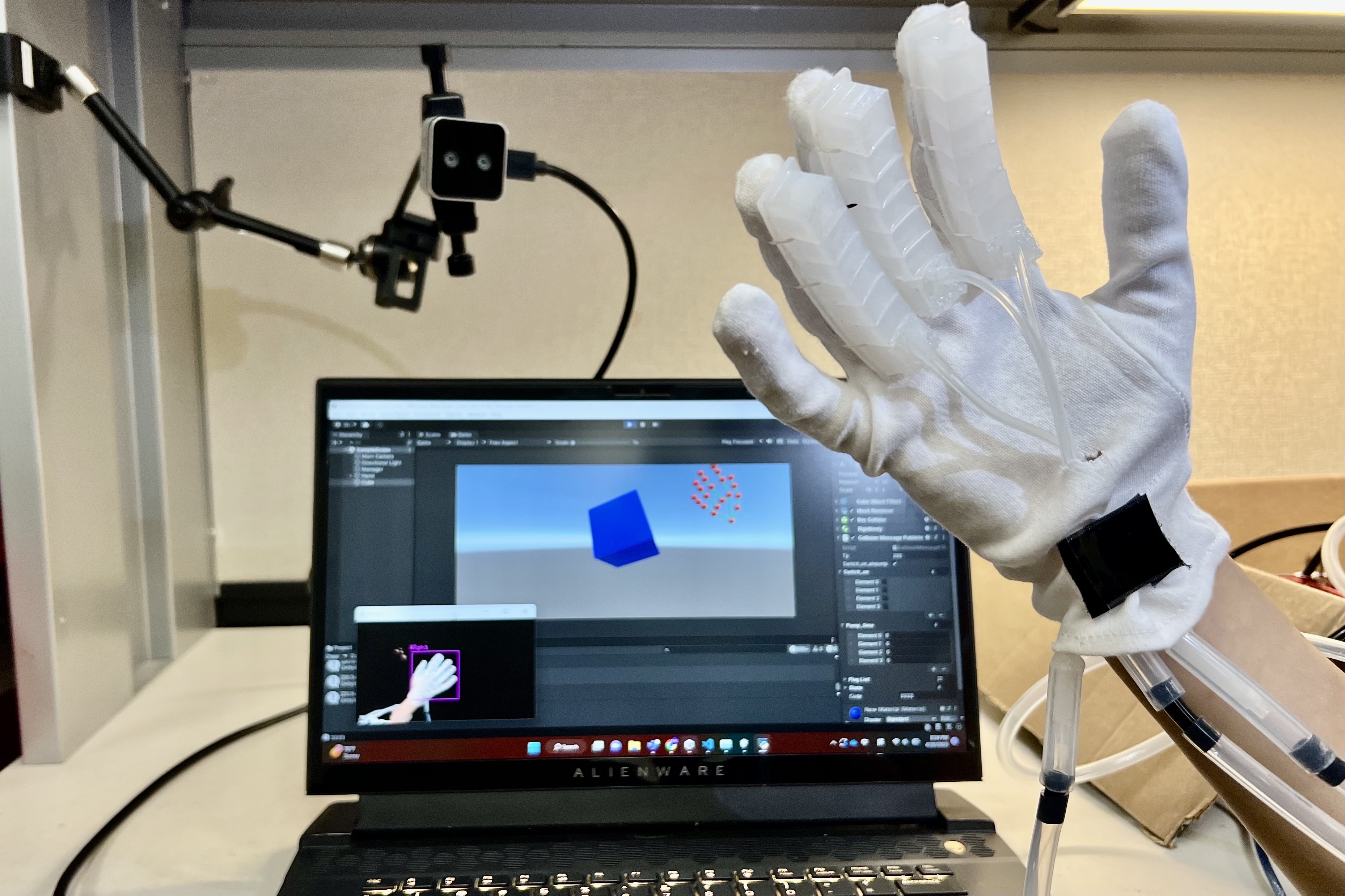 Pneumatic haptic glove captured in Unity 3D.
Pneumatic haptic glove captured in Unity 3D.